Boundary conditions
Contents
6.14. Boundary conditions#
include("smij-functions.jl");
Some more adventures in boundary conditions.
Superposition#
For a linear problem
where \(L\) and \(B\) are linear operators, you can solve the pair of problems
Then by linearity, \(u = v+w\).
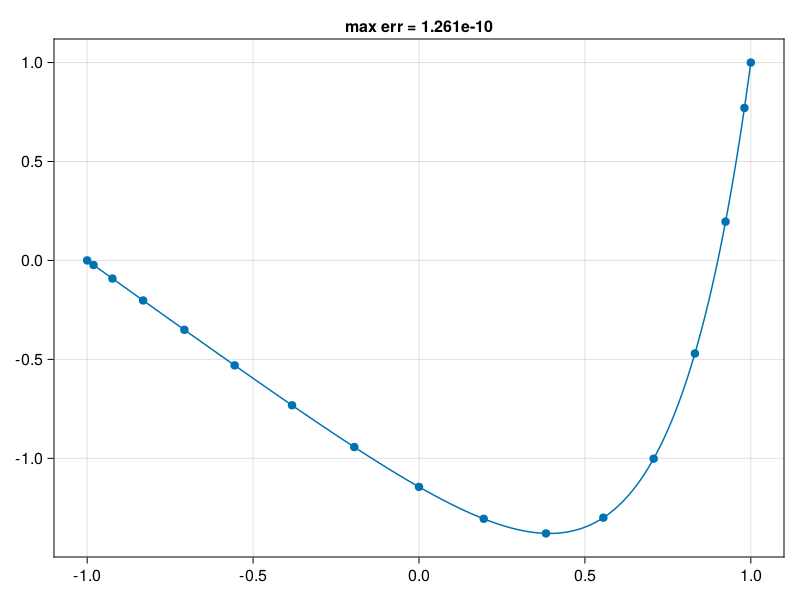
For example, to solve \(\partial_{xx} = e^{4x}\) subject to \(u(-1)=0\), \(u(1)=1\), we first note that the linear function \(\tfrac{1}{2}(x+1)\) satisfies the boundary conditions and has a zero second derivative. So we can add it to a solution of the ODE with homogeneous boundary conditions.
p32: solve \(\partial_{xx}u = e^{4x}, \quad u(-1)=0, \; u(1)=1\) (compare p13)#
N = 16
D, x = cheb(N)
D² = (D^2)[2:N, 2:N]
f = @. exp(4 * x[2:N])
u = D² \ f # Poisson eq. solved here
u = [0; u; 0] + (x .+ 1) / 2
using CairoMakie, PyFormattedStrings
fig, ax, _ = scatter(x, u)
xx = -1:0.01:1
uu = polyinterp(x,u).(xx)
lines!(xx, uu)
exact = @. (exp(4xx) - sinh(4)*xx - cosh(4)) / 16 + (xx + 1) / 2
ax.title = f"max err = {norm(uu - exact,Inf):.4g}"
fig
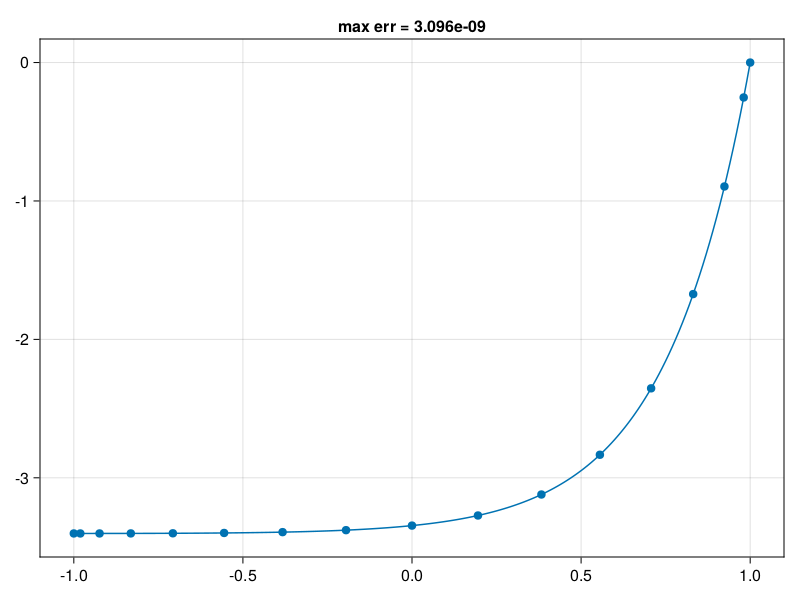
Neumann condition#
Remember, we can replace a row of a discretization of the ODE at all the grid points with a row of the boundary operator, and make a corresponding change to the forcing vector.
p33: solve linear BVP \(\partial_{xx} = e^{4x},\; u'(-1)=u(1)=0\)#
N = 16
D, x = cheb(N)
A = D^2
A[N+1, :] = D[N+1, :] # Neumann condition at x = -1
A = A[2:N+1, 2:N+1]
f = @. exp(4 * x[2:N])
u = A \ [f; 0]
u = [0; u]
fig, ax, _ = scatter(x, u)
# axis([-1, 1, -4, 0])
xx = -1:0.01:1
uu = polyinterp(x,u).(xx)
lines!(xx, uu)
exact = @. (exp(4xx) - 4exp(-4) * (xx - 1) - exp(4)) / 16
ax.title = f"max err = {norm(uu - exact, Inf):.4g}"
fig
Time-dependent condition#
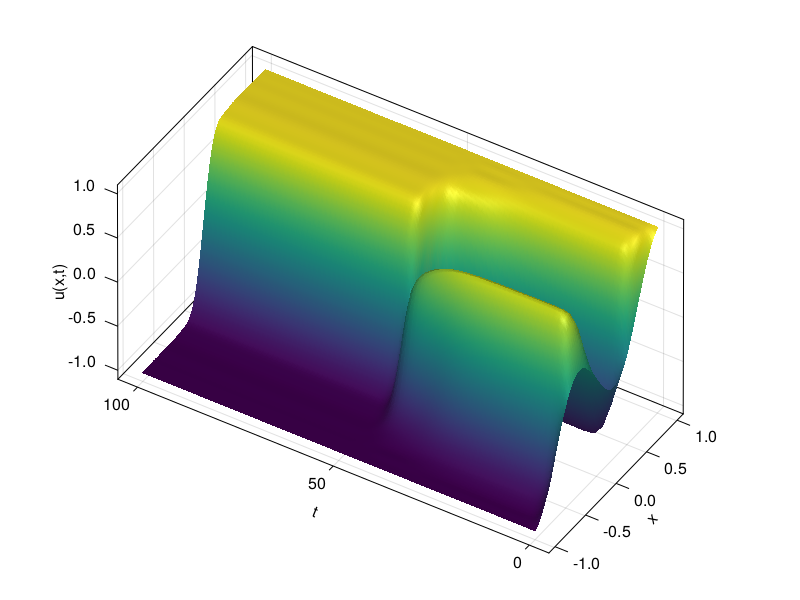
The Allen–Cahn equation is the PDE
There are three steady, constant solutions at \(u=0\) and \(u=\pm 1\). Ignoring the diffusion term, the interior state is unstable and the others are stable; in general, the solution prefers being at \(u=\pm 1\) for large regions, with rapid transitions between them.
We start with the steady conditions \(u(-1)=-1\), \(u(1)=1\). Note the metastable evolution as the solution slowly approaches minimal number of transitions between stable states.
6.15. p34 - Allen-Cahn eq., \(u(-1)=-1\), \(u(1)=1\)#
using OrdinaryDiffEq
# Differentiation matrix and initial data:
N = 20
D, x = cheb(N)
D² = (D^2)[2:N, :]
u₀ = @. 0.53x + 0.47sin(-1.5*π*x)
extend(t,v) = [1; v; -1]
function allencahn(u,ε,t)
du = ε*D²*extend(t,u)
@. du += u - u^3
return du
end
ivp = ODEProblem(allencahn, u₀[2:N], (0., 100.), 0.01)
sol = solve(ivp, Rodas5())
using CairoMakie
t = range(0, 100, 80)
xx = range(-1, 1, 80)
u = t -> polyinterp(extend(t,sol(t))).(xx)
U = hcat( [u(t) for t in t]... )
fig = Figure()
ax = Axis3(fig[1, 1],
aspect=(1,2,1), azimuth=3.7, elevation=0.7,
xlabel="x", ylabel="t", zlabel="u(x,t)"
)
surface!(xx,t,U)
fig
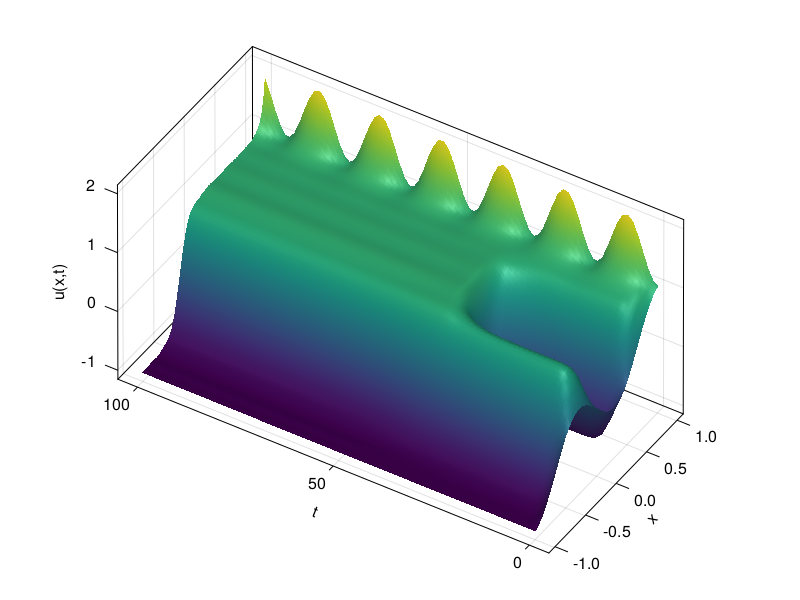
Now consider the boundary conditions
We can apply these simply by changing the definition of the extend function.
extend(t,v) = [1 + sin(t/5)^2; v; -1]
sol = solve(ivp, Rodas5())
using CairoMakie
t = range(0, 100, 80)
xx = range(-1, 1, 80)
u = t -> polyinterp(extend(t,sol(t))).(xx)
U = hcat( [u(t) for t in t]... )
fig = Figure()
ax = Axis3(fig[1, 1],
aspect=(1,2,1), azimuth=3.7, elevation=0.7,
xlabel="x", ylabel="t", zlabel="u(x,t)"
)
surface!(xx,t,U)
fig
Two space dimensions#
Same techniques apply to Laplace’s equation, say with boundary conditions
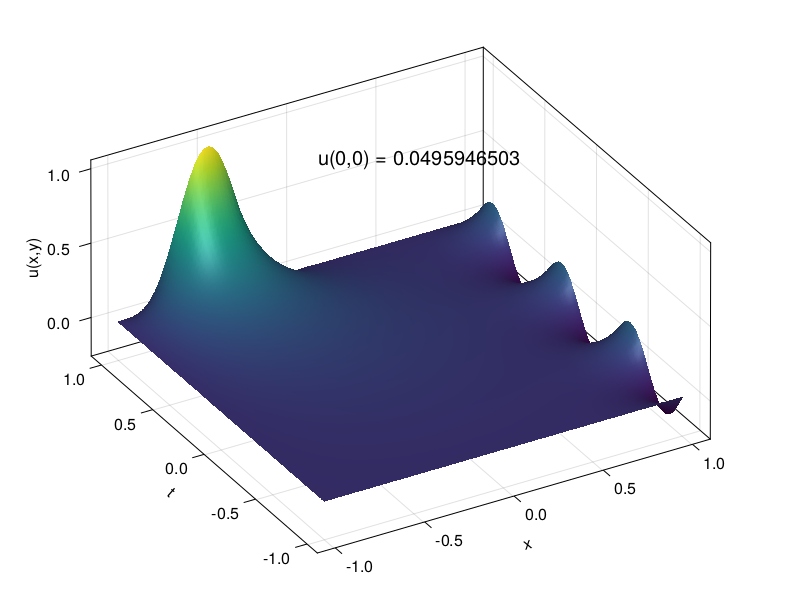
p36: Laplace eq. with nonzero BCs#
# Set up grid and 2D Laplacian, boundary points included:
N = 24
⊗ = kron
D, y = D, x = cheb(N)
D² = D^2
L = I(N+1) ⊗ D² + D² ⊗ I(N+1)
# Impose boundary conditions by replacing appropriate rows of L:
X = [ x for x in x, y in y ]
Y = [ y for x in x, y in y ]
bdy = vec(@. abs(X)==1 || abs(Y)==1)
bdy1 = vec(@. Y==1 && -1 < X < 0)
bdy2 = vec(@. X==1)
L[bdy, :] .= I((N+1)^2)[bdy, :]
f = zeros((N+1)^2)
f[bdy1] = @. sin(π*X[bdy1])^4
f[bdy2] = @. 0.2sin(3π*Y[bdy2])
# Solve Laplace equation, reshape to 2D, and plot:
u = L \ f
U = reshape(u, N+1, N+1)
xx = yy = range(-1, 1, 80)
UU = gridinterp(U, xx, yy)
fig = Figure()
ax = Axis3(fig[1, 1],
aspect=(2,2,1), azimuth=12π/9, elevation=π/6,
xlabel="x", ylabel="t", zlabel="u(x,y)"
)
surface!(xx, yy, UU)
umid = U[N÷2 + 1, N÷2 + 1]
text!(0, 0.8, 0.8, text=f"u(0,0) = {umid:.10f}")
fig
Wave equation in 2D#
Finally, let’s consider
If we have Neumann conditions in \(y\),
and periodic conditions in \(x\),
then the natural choice is a hybrid Chebyshev–Fourier method.
In order to implement the Neumann conditions, we prefer not to use a DAE, since the wave equation is nonstiff and can use an explicit method in time. So we will remove the boundary nodes from the discretization and implicitly define the values there by the Neumann conditions. Suppose that \(\bfu\) represents a vector of all \(Ny+1\) values along a line of constant \(x\). Then the Neumann conditions are
where \(\bfE\) comprises the first and last rows of an \((N_y+1)\)-dimension identity matrix, and \(\bfv\) is the part of \(\bfu\) excluding the endpoints. Thus,
which shows how to recover the endpoint values given the interior ones.
A note about the code below is that the OrdinaryDiffEq package can solve IVPs where the dependent variable is a matrix, which saves us from having to reshape the matrices representing \(u\) and \(\partial_t u\) into and out of a single vector.
p37: 2D “wave tank” with Neumann BCs for |y|=1#
# x variable in [-A,A], Fourier:
A = 3
Nx = 50
x, Dx, Dxx = trig(Nx)
x = @. (A/π)*x - A
Dxx *= (π/A)^2 # chain rule
# y variable in [-1,1], Chebyshev:
Ny = 15
Dy, y = cheb(Ny)
Dyy = Dy^2
ends = [1, Ny+1]
endvals = -Dy[ends, ends] \ Dy[ends,2:Ny]
chop(U) = U[:, 2:Ny]
function extend(V)
Uy = V*endvals'
return [Uy[:,1] V Uy[:,2]]
end
function waveeqn(W, p, t)
V, Vₜ = W[1:Nx,:], W[Nx+1:2Nx,:]
U = extend(V)
Uₜₜ = Dxx*U + U*Dyy'
return vcat(Vₜ, chop(Uₜₜ))
end
# Grid and initial data:
U = [ exp(-8 * ((x + 1.5)^2 + y^2)) for x in x, y in y ]
Uₜ = -Dx*U
W₀ = [chop(U); chop(Uₜ)]
ivp = ODEProblem(waveeqn, W₀, (0.,4.))
sol = solve(ivp, Tsit5());
function interp(sol,t,xx,yy)
V = sol(t)[1:Nx,:]
U = extend(V)
U1 = zeros(length(xx), Ny+1)
xx = @. π/A * (xx + A)
for j in axes(U,2)
U1[:,j] = triginterp(U[:,j]).(xx)
end
UU = zeros(length(xx),length(yy))
for i in axes(U1,1)
UU[i,:] = polyinterp(U1[i,:]).(yy)
end
return UU
end
xx = range(-3, 3, 100)
yy = range(-1, 1, 65)
surface(xx, yy, interp(sol, 1, xx, yy))
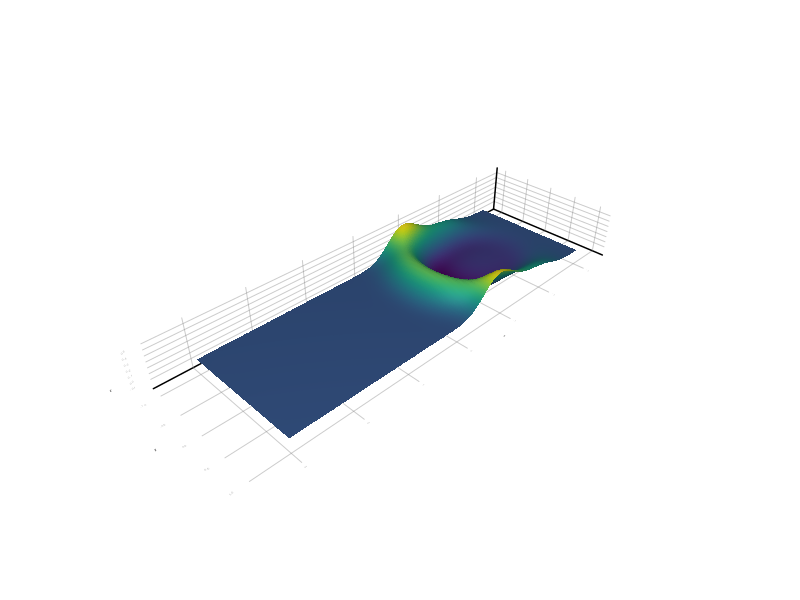
fig = Figure(size=(480,320))
ax = Axis3(fig[1, 1], aspect=(3, 1, 2),
xlabel="x", ylabel="y", zlabel="u",
azimuth = 1.3π
)
time = Observable(0.0)
UU = @lift( interp(sol, $time, xx, yy) )
surface!(xx, yy, UU, colormap=:bluesreds, colorrange=(-2.5,2.5) )
record(fig, "p37.mp4", range(0, 4, 101)) do t
time[] = t
ax.title = f"t = {t:.2f}"
zlims!(ax, -2.5, 2.5)
end;