
3. Initial-value problems¶
A consistent theme so far about first-order ODEs is that solutions are not unique. There is a general solution that describes a family of functions that provide all possible solutions. The manifestation of the nonuniqueness is an integration constant.
In scientific and engineering problems we typically have an additional constraint that picks out a single member of the solution family, i.e., a particular solution. Usually that constraint takes the form of a specified value,
where \(t_0\) and \(x_0\) are known or used as parameters. Such a constraint combined with a first-order ODE leads to an initial-value problem, or IVP for short:
In this case the constraint \(x(t_0)=x_0\) is called an initial condition, and it’s typically implied that the problem is to be solved for \(t>t_0\).
A solution of an IVP has to satisfy both the ODE and the initial condition. This is enough to specify the solution uniquely.
Example
In the previous section we said that the general solution of \(x'=ax\) is \(x(t)=Ce^{at}\). If we are supplied with the initial value \(x(2)=5\), then we require
in which case \(C=5e^{-2a}\). Thus the solution to this IVP is
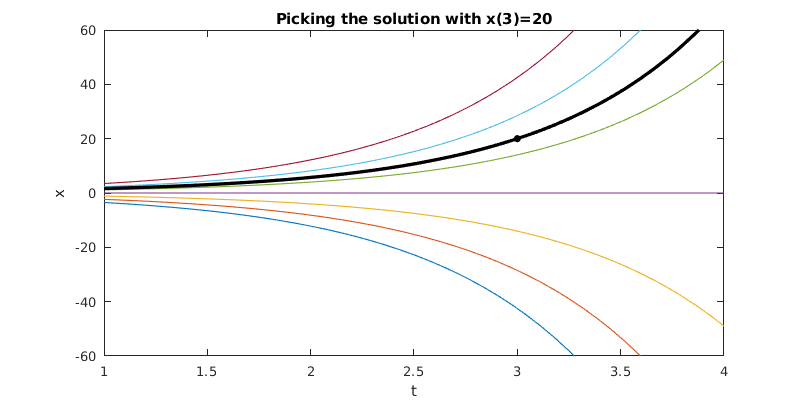
A graphical interpretation of the role of an initial condition is that the general solution is a family of curves in the \((t,x)\) plane, and the initial condition is a point that the particular solution of interest must pass through.
a = 1.25;
for C = [-1 -0.67 -0.33 0 0.33 0.67 1]
fplot(@(t) C*exp(a*t),[1,4])
hold on
end
plot(3,20,'k.','markersize',11)
fplot(@(t) 20*exp(a*(t-3)),[1,4],'k','linew',1.5)
ylim([-60 60])
xlabel('t'), ylabel('x')
title('Picking the solution with x(3)=20')
3.1. Numerical solutions¶
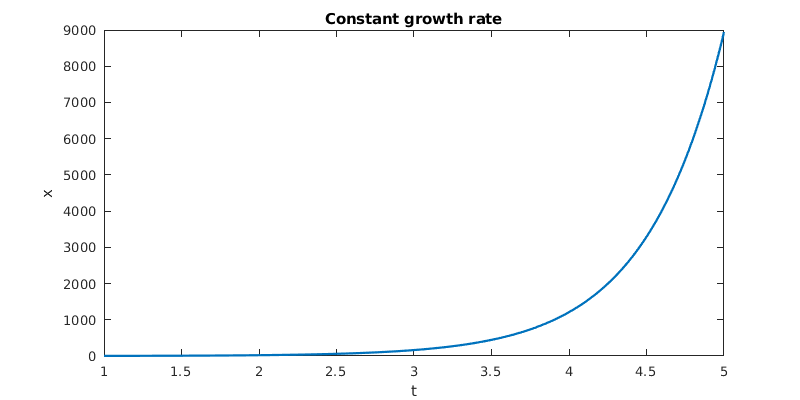
Because an initial-value problem has a unique solution, it’s a suitable target for a numerical simulation. We will use the function ode45 to provide such numerics in MATLAB. For example, here is constant growth subject to the initial condition \(x(1)=3\).
f = @(t,x) 2*x;
t = linspace(1,5,300);
[t,x] = ode45(f,t,3);
clf
plot(t,x)
title('Constant growth rate')
xlabel('t'), ylabel('x')
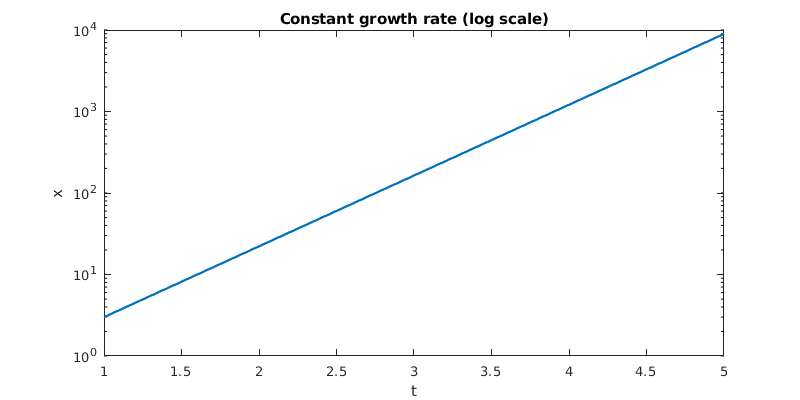
Exponential growth or decay is best plotted on a log-linear scale, where the solution becomes a straight line.
semilogy(t,x)
title('Constant growth rate (log scale)')
xlabel('t'), ylabel('x')
Here’s our example of variable growth. Note that we are not using the known exact solution, but just letting MATLAB create a numerical approximation by other means.
f = @(t,x) 2*t*x;
t = linspace(0,5,300);
[t,x] = ode45(f,t,1);
clf
semilogy(t,x)
title('Growing growth rate')
xlabel('t'), ylabel('x')
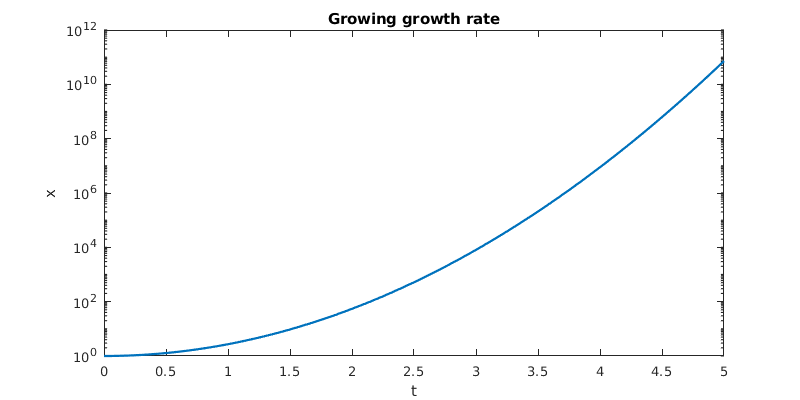
Even on the log scale, the solution bends upward, showing superexponential growth. Finally, here is the nonlinear feedback problem.
f = @(t,x) x^2;
t = linspace(0,4,300);
[t,x] = ode45(f,t,0.5);
semilogy(t,x)
title('Nonlinear growth')
xlabel('t'), ylabel('x')
Warning: Failure at t=1.999933e+00. Unable to meet integration tolerances without reducing the step size below the smallest value allowed (3.552714e-15) at time t.
> In ode45 (line 360)
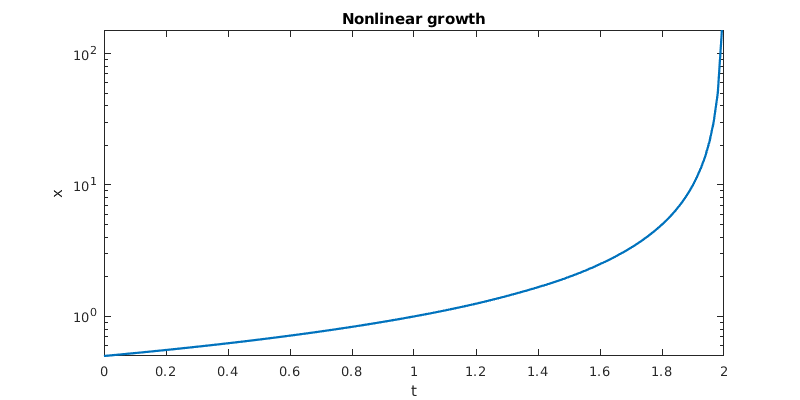
The warning issued here can mean that there is a bug in the code, but in this case, it’s just MATLAB noticing the finite-time blowup. In fact, it gets the true blowup time rather accurately.